Crawler-type Unmanned Ground Vehicle Introduction to Multitasking General Platform
Characteristics
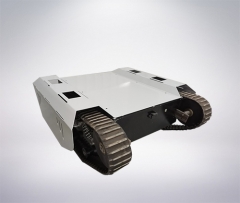
★ The platform adopts integral body structure, with strong bearing capacity and large internal space. The body is made of high strength nonmetallic plate, which has the characteristics of high strength, light weight, no deformation and no radar characteristics.
★The transmission and steering system adopts fully enclosed splash lubrication structure, which greatly improves the reliability and durability of the transmission system.
★ Dual power input design, flexible configuration of power source, convenient realization of oil-electric hybrid drive.
★ Electronically controlled dual-flow steering system is the premise to ensure high maneuverability and flexibility of the platform, and also the fundamental of high efficiency and low energy consumption transmission.
★ The two-gear mechanical transmission mechanism can be perfectly adapted to the obstacles on the ground.
★ High performance adjustable stroke suspension, not only compact structure, high efficiency and durability, but also adjust the platform posture, is also high speed, high passability of the structure guarantee.
★ The pin-connected anti-trip track and the double-flange bridge roadwheel ensure the platform smooth when passing through various complex ground, and also the reliable guarantee for the platform to overcome various natural obstacles.
★ The peripheral-vision system enables the operator to always know the surroundings of the platform like the palm of his hand and control it freely.
Main technical indicators
Car body
1, Overall size (L×W×H) : 1120×625×340 ~ 430(mm);
2, Loading tank size (L×W×H) : 450×380×230(mm);
3, Track landing length: 600 ~ 970mm;
4, Track center distance: 510mm;
5, Track width: 110mm;
6, Ground clearance: 85 ~ 170mm;
7. Maximum travel of the roadwheel: 85mm;
8, Weight: 50kg;
9, Load: 30kg on the ground, 15kg on the water.
performance
1, Main power supply: 24V/40AH polymer lithium battery, running time is more than 120 minutes;
2, Auxiliary power output: 12V/5A, 5V/8A;
3, Main motor power 350W, steering motor power 250W;
4, Maximum ground speed: 35km/h(fuel power);
5, Maximum water speed: 3km/h;
6, Attitude adjustment: -10° ~ +10° (longitudinal)
7, Maximum climbing slope: 35°;
8, Maximum side slope: 25°;
9. Maximum vertical obstacle: 240mm;
10, Trench width: 450mm;
In today's battlefield, speed means opportunity, who wins the speed of the first to seize the opportunity. Unmanned platforms can act as assault, rescue, and transport pioneers because they do not need to consider human factors. Therefore, we need to make breakthroughs in speed and passability. In addition, due to the lack of a clear judgment of the site environment when the unmanned platform passes through various complex terrains, it especially needs super performance indexes in terms of anti-overturning, anti-falling, anti-track shedding and so on.
The high-speed tracked unmanned platform will play an important role in assault, penetration, urban anti-terrorism, nuclear and biochemical detection, battlefield rescue, short-distance assault transport, reconnaissance before ground maneuver in unknown dangerous areas, accompanied by warning, regional surveillance and other aspects.
The high-speed tracked unmanned platform will develop into a series of reconfigurable modular platforms. Equipped with command vehicles, remote operation is the main, aided by intelligent control and information sharing system. It can form a single or cluster coordinated battle group to complete different missions and tasks.